L'homme et l'espace sont soumis à la loi.
Quelle est la loi qui doit s'appliquer ?
Travail de bachelor
de Tobias Wolf
Université Bauhaus de Weimar, 2016
Tout part du moi.
Les organes sensoriels de l'être humain collectent des informations, qui sont ensuite interprétées. L'homme se crée une image de son environnement. Son environnement est son miroir et donc aussi une image de lui-même. C'est ce qui nous reste : une image.
Socrate
Notre corps, ne dirons-nous pas qu'il a une âme ?
Protarchos
Apparemment, nous le voulons.
Socrate
Mais d'où l'aurait-il reçue, ô mon cher Protarque, si le corps tout entier n'était pas lui aussi animé, ayant la même chose que lui, et plus excellent encore à tous égards ?
Définition de l'être humain
L'être humain est multiple. Ce que signifie être un être humain est - heureusement pour nous - une question à laquelle on ne pourra jamais répondre. Ce qui est nécessaire pour le présent travail consiste à considérer ce qui caractérise l'être humain, ce qui le rend unique : ses pensées, ses sentiments, la psyché, l'esprit, la conscience, l'âme. En dessous se trouve l'organique, le corps, le corps, l'organisme. Cette séparation ne fonctionne que jusqu'à ce que le cerveau soit considéré.
Dans le cerveau, le corps et l'esprit, le corps et l'âme se mélangent.
Le corps et l'âme ne peuvent pas être séparés. Cependant, l'origine, le plus profond de l'être humain reste dans l'organique.
Définition de l'espace
L'espace peut être décrit physiquement : Tridimensionnel : largeur, profondeur, hauteur. A l'intérieur, la matière et les champs. Grâce à la quatrième dimension indispensable, le temps, l'espace devient le lieu des processus physiques. Selon la science, l'espace et le temps sont relatifs l'un à l'autre.
L'espace culturel est au moins étymologiquement apparenté à l'espace physique, qui a également été mentionné ici et qui doit également être inclus comme symbole, comme manière de voir le travail.
L'homme et l'espace sont soumis à la loi. À qui la loi doit-elle s'appliquer ?
La tentative de relier l'homme et l'espace
L'espace n'est perçu comme tel que par l'expérience de l'homme. Il n'y a pas de hiérarchie. Les deux se conditionnent mutuellement. L'homme ne peut pas être sans l'espace et l'espace n'est pas sans l'homme.
Ils coexistent toujours et sont pourtant si différents.
L'homme, le vivant, l'organique, le sensuel, l'animé, se retrouve dans l'espace, l'inanimé, le statique, le physique, le cubique.
C'est ce dualisme entre l'homme et l'espace que je souhaite briser dans ce travail : Le plus profond de l'homme est transmis à l'espace, l'espace est à son tour perçu par l'homme. Un cycle porté par le temps.
Mais de même que la moyenne de deux lignes, d'un côté d'un point, après avoir traversé l'infini, se retrouve soudain de l'autre côté, ou que l'image du miroir concave, après s'être éloignée dans l'infini, se retrouve soudain tout près de nous, de même, lorsque la connaissance a pour ainsi dire traversé un infini, la grâce se retrouve ; de sorte qu'elle apparaît, en même temps, la plus pure dans la structure du corps humain qui n'a pas de conscience du tout, ou qui a une conscience infinie.
Réflexion infinie
La grâce n'est que dans aucune conscience ou dans la conscience infinie, dit Kleist. Mon travail de bachelor est une tentative d'approche de la conscience infinie.
Chaque jour, nous rencontrons d'autres personnes qui, par leurs paroles ou simplement par un geste, un regard, sont un miroir pour nous. Le soi passe par l'autre. Il est perçu et interprété par lui de manière filtrée. Cela s'exprime à son tour par le langage ou la gestuelle. Le miroir dans lequel nous nous regardons est donc troublé par l'interprétation.
Dans mon travail, il n'y a que l'homme et l'espace, rien d'autre. L'espace sert de miroir à l'homme. L'espace reflète ce que l'homme a de plus intime. C'est l'idéal recherché.
L'espace doit être aussi peu aménagé que possible. Le noir est le néant, le vide ; le blanc, l'être, l'espace. La limite de l'espace doit être la matière sensible. L'espace doit reproduire les battements du cœur à l'échelle 1:1.

Installation dans l'espace
L'espace est cubique et mobile. Les bords supérieur et inférieur de la pièce sont définis par des élastiques blancs, les murs par des cordes de laine blanche. Le sol existant de la salle d'exposition sert de plancher. Le plafond reste ouvert, noir. L'espace est éclairé par une lumière UV placée au centre du plafond de la pièce.
Le rythme cardiaque de la personne qui reçoit l'image est mesuré par un pulsomètre placé sur son avant-bras. Cette image du rythme cardiaque est transmise à un Arduino. Celui-ci commande des moteurs qui, à leur tour, mettent en mouvement les élastiques de manière synchrone avec les battements du cœur. La pièce simule le cœur de la personne qui la reçoit.
La personne se tient dans une image de son cœur. Elle se trouve au cœur de son cœur.

Structure de la pièce
L'échafaudage cubique est en bois. L'échafaudage mesure 4 × 4 × 3 mètres. Il est suspendu par du molleton et n'est donc pas visible.
Un moteur est fixé à chaque coin supérieur. Deux lignes de pêche sont fixées à chaque moteur via une bobine.
Une ligne de pêche est reliée au sandow supérieur. L'autre ligne de pêche descend, est déviée par une poulie et est reliée à l'élastique inférieur. Un contrepoids est fixé à l'autre extrémité des lignes de pêche. Ainsi, les sandows ont une tension de base.
Entre les deux sandows, des fils de laine blancs sont tendus à une distance d'environ trois centimètres. Les élastiques et les cordes de laine forment un espace mobile de 3 × 3 × 3 mètres.
D'un côté, les distances entre les cordes de laine sont plus grandes. Cela permet de marquer l'entrée/la sortie.
Au plafond, au centre de la pièce, se trouve une lampe UV. Le plafond est suspendu avec du molleton. Grâce à la lumière UV, seules les cordes en caoutchouc et les ficelles de laine sont visibles.
Déroulement
La personne qui reçoit prend le pulsomètre sur le podium et le place sur son avant-bras.
Elle entre dans la pièce.
Au bout de quelques secondes, le pulsomètre a détecté le pouls/le rythme cardiaque de la personne qui le reçoit. La salle prend en compte le rythme cardiaque.
La personne peut se déplacer à sa guise dans la pièce.
Si elle quitte la pièce, elle appuie sur le bouton du pulsomètre ou l'enlève, le mouvement de la pièce s'arrête.

Fonctionnement
Le pulsomètre est doté de deux LED qui éclairent la peau de la personne qui le porte. La réflexion de la lumière varie en fonction du sang qui circule et est mesurée par un capteur. On peut en déduire le pouls et, à partir de celui-ci, les battements du cœur. Le pulsomètre envoie via Bluetooth les battements par minute (BPM) dès qu'il a pu les déterminer. Ensuite, il envoie chaque autre pulsation détectée - si la personne qui porte le cardiofréquencemètre bouge beaucoup, la pulsation peut être moins bien déterminée.
Les BPM sont reçus par un ordinateur. Comme on peut supposer que la porteuse bougera et que chaque pulsation ne pourra donc pas être déterminée et donc envoyée, les BPM sont simulés par un algorithme simple.
A chaque pulsation (qu'elle soit directement issue du capteur ou simulée), l'ordinateur transmet un signal à l'Arduino. Avec chaque signal, l'Arduino envoie à son tour 1400 signaux de pas en 200 millisecondes à quatre pilotes de moteurs pas à pas.
Ceux-ci interpolent à leur tour les signaux pas à pas, contrôlent le courant et veillent à ce que les quatre moteurs tournent d'environ 130 degrés pendant les 200 millisecondes. Les moteurs sont clairement audibles. Ensuite, l'Arduino veille à ce qu'il n'y ait plus de tension sur les moteurs. La tension mécanique des câbles en caoutchouc fait à nouveau tourner les moteurs d'environ 130 degrés dans la direction opposée.
Ce processus se répète jusqu'à ce que la personne qui le reçoit quitte la pièce, retire le pulsomètre ou appuie sur le bouton du pulsomètre.

Considération de l'espace, du récepteur et de la technique
L'espace, le récepteur et la technique. Je vais maintenant examiner ces trois éléments/supports de mon travail.
L'espace
L'espace doit être un symbole de tout. Un espace qui symbolise le monde dans lequel nous vivons. La plupart des gens vivent dans des villes. Celles-ci sont caractérisées par leur architecture. Et, même si la plupart des architectes contemporains et la Gründerzeit s'y opposent, la plupart des bâtiments, des rues, des arrêts de bus et des bordures de trottoir restent cubiques.
Quand les gens ne se déplacent pas dans les villes, ils se déplacent dans des espaces numériques (Facebook, Snapchat et autres). Un espace culturel dont la base est également construite sur des briques mathématiques. Les plateformes numériques sur lesquelles nous communiquons sont basées sur des opérateurs logiques.
En outre, comme le montre l'ambiance politique actuelle, les gens aspirent à la clarté, à des formes simples et à des vérités. (Daesch, Erdogan, AFD, Trump).
C'est pourquoi j'ai choisi un cube comme forme spatiale. Cubique, mathématique et simple. Les cordes de laine verticales peuvent faire penser à des barreaux. Mais ils sont si proches les uns des autres qu'ils peuvent aussi être perçus comme une surface. De plus, les barreaux apparents sont souples et flexibles.
Dès le premier battement de cœur, l'espace perd toutes ses caractéristiques. En raison de la tension et du relâchement rapides des câbles en caoutchouc, les cordes de laine oscillent d'avant en arrière.
L'espace prend vie.
Le battement de cœur de la personne qui reçoit est son moteur.
L'espace perd ses caractéristiques initiales et prend les caractéristiques organiques d'un être vivant, les caractéristiques de la personne qui le reçoit.
Lorsque la réceptrice quitte la pièce, les cordes de laine continuent à vibrer brièvement, mais reprennent rapidement leur forme initiale et ordonnée. La pièce ne reste vivante que tant que l'être humain y est présent.
La personne qui reçoit
Après être entrée dans la pièce, la personne qui la reçoit se retrouve dans ce même monde cubique, mathématique et simple. L'obscurité et les cordes de laine verticales étroitement alignées semblent surréalistes, irréelles ; très différentes du monde connu. Mais il serait possible de s'échapper de ce monde. Les cordes de laine pourraient théoriquement être brisées.
Dès que l'on commence à s'y intéresser, l'espace se met à bouger. En faisant osciller les cordes de laine, l'espace perd sa forme actuelle et donc sa signification initiale.
La personne qui le reçoit regarde l'image des battements de son cœur. Cette image est dessinée sur la forme cubique, mathématique et simple de l'espace initial.
En regardant l'image de son cœur, la destinataire regarde au plus profond d'elle-même, elle se regarde elle-même. L'introspection.
La technique
La technique se situe entre la personne qui reçoit et l'espace. Les battements de cœur sont interprétés par le capteur de pouls et transmis à la pièce via les ondes radio, les ordinateurs, les composants électroniques et les moteurs. Cela a pour conséquence que le produit qui en résulte n'est justement pas le reflet du battement de cœur, mais ce qu'il en reste après le passage par la technique. Il nous est donc impossible de retrouver notre moi dans l'espace. Le monde technologique ne nous aide justement pas à nous reconnaître.
Ce que nous pouvons reconnaître est forcément marqué, d'une part par la technique utilisée et d'autre part par sa conception. En outre, la perception des battements du cœur est également marquée par les organes sensoriels. L'homme ne perçoit que ce qu'il peut percevoir et non ce qui est éventuellement présent.
L'idée éventuelle que la personne qui reçoit cette installation pourrait se reconnaître elle-même devrait donc être brisée. Cependant.
Ce que la technique peut faire, c'est nous montrer un regard nouveau, différent. Et il en va de même pour tout. Rien ne peut être un miroir parfait pour nous. L'image que nous percevons de nous-mêmes est toujours incomplète et déformée. Mais c'est peut-être la somme de toutes les parties qui nous permet de nous reconnaître.
L'aliénation de son propre corps par le numérique
L'homme se définit de plus en plus par des likes, des émoticônes et des GIF. Ce qui reste de son corps est une image en deux dimensions, formée par la puce de la caméra du smartphone et encadrée par le capitalisme américain.
Certaines personnes tentent d'optimiser leur santé à l'aide de trackers de fitness en s'observant apparemment elles-mêmes. Une entreprise dont l'intérêt intime est de gagner de l'argent a programmé un algorithme qui nous dit si nous devons faire du jogging plus ou moins vite.
Dans ce monde numérique, notre propre corps n'a plus d'importance. Plus nous déplaçons notre vie dans le monde numérique, plus ce monde devient un miroir de plus en plus grand et important de l'homme. Ce miroir est construit à partir de ce que l'homme a écrit, photographié et filmé. Mais ce n'est qu'une petite partie de nous-mêmes.
Contrairement à l'homme, les algorithmes n'ont aucune idée de ce que c'est que d'être humain. Pourtant, ils nous influencent en nous suggérant ce que nous devons acheter, quels amis nous devons ajouter à nos "bons amis" et quel parti nous devons aimer. Bientôt, les algorithmes, alimentés par les émanations humaines, simuleront l'humanité. Mais sans corps. Pourtant, le corps et l'âme sont inséparables.

Homme & Espace et
tele-present water
David Bowen - 2011
L'installation cinétique montre les mouvements de l'eau. Les données relatives aux mouvements de l'eau proviennent d'une bouée située dans l'océan Pacifique.
En modifiant l'espace, David Bowen rend visibles des choses qui seraient autrement restées cachées. Les caractéristiques du sujet sont interprétées et transformées en une nouvelle forme par le biais de la technique. Ce faisant, il ne cache pas la technique. La technique est une partie active de l'objet. Les données de l'eau ne sont malheureusement pas transmises en temps réel. Le temps réel intensifierait l'expérience de la contemplation de l'œuvre d'art.
Il est clair qu'il est impossible de copier la nature ou de la représenter 1:1. On ne peut créer qu'une seule image, imposée par la technologie. Peu importe que la technologie soit un pinceau, un ordinateur ou un réseau neuronal artificiel.

Homme & Espace et
Body SPIN : Course à l'impulsion
Time's Up - 2003
Body SPIN est une sphère de trois mètres de diamètre sur laquelle on peut marcher. En fonction des mouvements de la personne qui la reçoit, des images générées par ordinateur sont projetées dans la sphère. Plusieurs programmes peuvent être diffusés. Dans le programme Pulse Race, la personne qui le reçoit porte en outre un pulsomètre. Dans Pulse Race, la personne doit courir jusqu'à la cible. Mais la cible s'éloigne à chaque pulsation.
La participante lutte avec son extérieur (course) contre son intérieur (battements de cœur). Il apparaît clairement que l'intérieur et l'extérieur se conditionnent mutuellement. Il s'agit d'une dualité. On lutte avec son corps contre son corps. La perception est principalement guidée par l'optique. L'objectif est un simulacre.
Dans ce travail, les dernières avancées technologiques sont présentées dans un spectacle de performance. Technologiquement, cela a certainement impressionné à l'époque. Mais ce travail part de la technologie et non de l'homme. Les appareils techniques que la personne qui les reçoit doit porter sur elle et les projections techniques l'emportent sur l'humain.

Homme & Espace et
Château blanc de Bouncy
William Forsythe, Dana Caspersen et Joel Ryan - 1997
White Bouncy Castle est une structure gonflable de 30 mètres de long et 11 mètres de haut en forme de château.
Dans leur travail, William Forsythe et Dana Caspersen ne font pas seulement disparaître les danseuses, mais déforment en même temps le plancher de danse. Les visiteuses deviennent elles-mêmes des danseuses, guidées par les particularités incontrôlables du sol. Le sol branlant forme également un fort contraste avec la piste de danse classique, qui sert pourtant à soutenir la danseuse et à lui permettre des mouvements précis. La beauté d'une structure gonflable est qu'elle offre à l'homme la possibilité de défier la pesanteur pendant de brefs instants. Dans les airs, l'homme n'est pas chez lui, d'où une perte de contrôle qui peut à son tour déboucher sur des situations sociales absurdes.
Les déformations du sol / de l'espace sont aléatoires et pourtant, elles trouvent leur origine dans les mouvements des visiteurs. Ainsi, l'espace est également un miroir de la vitalité des visiteuses. Mais contrairement à mon travail, c'est l'expression de plusieurs personnes qui est rejouée ici et non l'organique d'un seul individu.

Documentation
Je suis resté sur la citation d'Oskar Schlemmer "L'homme et l'espace sont remplis de lois. A qui la loi doit-elle s'appliquer ?". Je me suis demandé comment on aborderait ce problème aujourd'hui. Comment briser ce dualisme ? Comme tout part justement de l'homme, je voulais créer un espace qui adopte les lois de l'homme.
Dans un premier temps, j'ai supposé que ce qu'il y avait de plus humain chez l'homme se trouvait dans le cerveau. On peut mesurer les ondes cérébrales à l'aide de l'électroencéphalographie (EEG). Il existe pour cela des produits de consommation à prix raisonnable, mais cela aurait entraîné quelques restrictions. Le programme informatique lié à l'EEG a besoin d'un programme d'entraînement avant de pouvoir se risquer à faire des déclarations sur l'état émotionnel de l'utilisateur. Les déclarations de tels EEG sont extrêmement vagues et plus apparentes que réelles. De plus, si l'on peut trouver des arguments en faveur de l'affirmation selon laquelle la partie la plus humaine de l'être humain se trouve dans le cerveau, cela n'est en aucun cas absolu.
J'ai donc opté pour le cœur qui, par sa symbolique, représente peut-être encore plus l'émotion de l'être humain que de vagues ondes cérébrales. Finalement, les battements de cœur sont plus faciles et plus évidents à mesurer.
Certainement influencé par les images architecturales typiques du Bauhaus, l'espace blanc et cubique m'est apparu comme l'espace le plus spatial.

L'espace est toujours une contrainte pour l'homme. La force d'attraction, en tant que partie de l'espace, empêche l'homme de sauter à l'infini dans les hauteurs. L'architecture nous bloque les regards et les chemins. C'est pourquoi l'une des réflexions a été d'adapter directement l'espace / l'architecture à la volonté de l'homme. Si l'homme se déplace rapidement, son cœur bat plus vite et il a peut-être besoin de plus d'espace. L'espace pourrait s'agrandir.
Une première réflexion a consisté à construire la pièce entièrement en bois. Une machinerie placée sous le sol de la pièce permettrait d'agrandir et de réduire la pièce. Mais une telle construction aurait été extrêmement complexe et coûteuse. Il est donc vite apparu qu'une telle réalisation était totalement utopique.

Modèle d'espace 1
Un tissu flexible pourrait également former une pièce. Des moteurs placés aux coins pourraient agrandir ou réduire l'espace. Cette réflexion a donné naissance en quelques heures à un premier modèle en fil de fer et en collants.
Sur ce modèle, on constate que le tissu s'incurve au milieu. La pièce perd donc sa forme cubique.

Modèle de pièce 2
Modèle en bois, tissu extensible, huit pailles, fil de pêche ; Arduino Uno, moteur pas à pas (Sparkfun Electornics [ROB-10846]), pilote de moteur pas à pas (SilentStepStick), ordinateur, pulsomètre à ceinture pectorale (ICubeX BioVolt Sensor) connecté à un Arduino Yún, batterie pour Arduino Yún.
Les données du pulsomètre sont envoyées à un ordinateur par wifi à l'aide de l'Arduino Yún. Celui-ci transmet à son tour les données à l'Arduino Uno, qui commande le pilote du moteur pas à pas.
Il est apparu clairement qu'une grande force est nécessaire en très peu de temps. Le moteur pas à pas n'a pu étirer le tissu que de quelques centimètres. En outre, il était évident que le tissu lui-même continuait à osciller. La mise en place du pulsomètre est très compliquée. Les contacts du pulsomètre doivent être humidifiés avec un gel. Un sac contenant l'Arduno Yún et une batterie doit être porté à l'épaule. L'avantage d'une ceinture thoracique est toutefois qu'elle permet de mesurer les battements du cœur avec plus de précision.
Le modèle spatial 2 a été exposé pendant la summaery 2015.
Il était possible de voir son rythme cardiaque dans le modèle spatial. Cependant, on ne pouvait voir le modèle que de l'extérieur. On ne faisait pas partie de la pièce. La conséquence logique est de construire une pièce dans laquelle on peut aussi marcher. La maquette a montré que tout ce qui est technique est possible.

Construction de la pièce : ossature en bois
Je savais que j'allais devoir faire beaucoup d'expériences. C'est pourquoi j'ai d'emblée déclaré que mon espace de travail serait aussi mon futur espace d'exposition. Mon espace de travail mesure 420 × 480 × 300 cm. En conséquence, j'ai planifié l'installation pour cette taille à l'aide de croquis, d'un modèle Blender et des conseils de l'apprenti menuisier Benjamin.
Matériel
Supports verticaux, bois (épicéa) : 280 × 10 × 10 cm (4 pièces)
Barres horizontales & entretoises, bois (épicéa) : 400 × 6 × 10 cm (6 pièces)
Panneaux triangulaires, panneau stratifié (épicéa) : 60 × 60 cm (2 pièces)
Équerres 70 × 70 × 55 × 2,2 mm (12 pièces)
Vis (100 pièces)

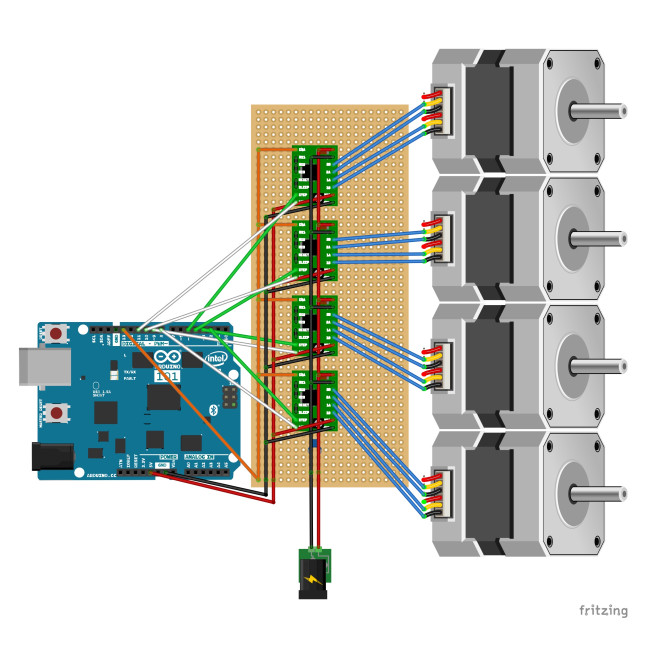
Commande de moteur
Matériel
4 moteurs pas à pas : Pololu Stepper Motor : Unipolar/Bipolar, 200 Steps/Rev, 57 × 76 mm, 4.5 V, 2 A/Phase
4 pilotes de moteurs pas à pas : Pololu A4988 Stepper Motor Driver, Black Edition
Condensateur : 63 V / 1000 µF
Source de courant 24 volts / 10 ampères
Arduino 101
Ventilateur de boîtier avec convertisseur de tension en amont
Circuit imprimé, étain à souder & câble de jumper
Comme je savais que des forces très puissantes seraient nécessaires pour déplacer la pièce, j'ai opté pour des moteurs pas à pas avec un couple de maintien de 14 kg/cm. Ces moteurs nécessitent en conséquence beaucoup de courant (2 A/phase). J'ai donc choisi des pilotes de moteurs pas à pas capables de supporter cette intensité, avec un refroidissement approprié. Pour le refroidissement, j'utilise de petits radiateurs placés sur les drivers de moteur et un ventilateur de boîtier qui alimente les drivers de moteur en air froid. Pour piloter les pilotes de moteur, j'ai choisi l'Arduino 101, qui a une fréquence d'horloge plus élevée que l'Arduino Uno. Cela permet d'envoyer plus de signaux aux pilotes de moteur par unité de temps. La source de tension fournit 10 ampères, juste assez pour alimenter les quatre moteurs avec 2 ampères chacun. Une tension de 24 volts assure une synchronisation rapide des pilotes, ce qui permet aux moteurs de tourner le plus silencieusement possible.

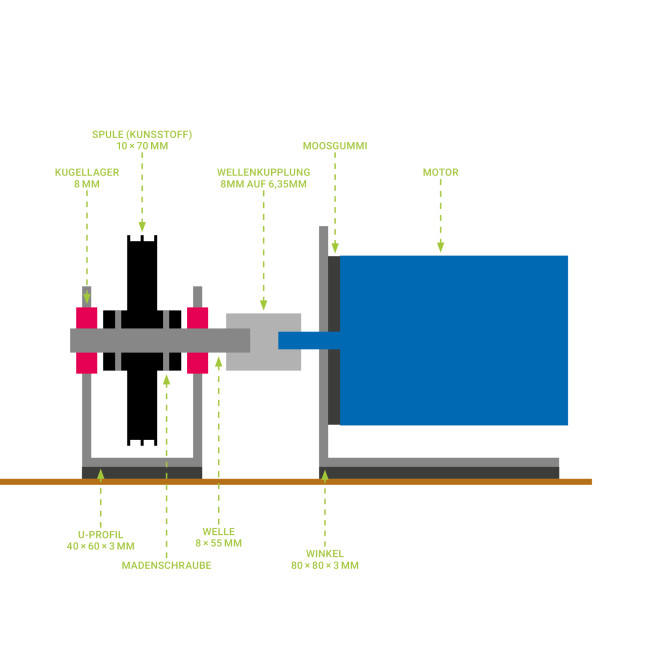
Suspension du moteur
Un moteur avec une bobine est fixé à chaque coin supérieur de la pièce. Un fil de pêche est enroulé plusieurs fois autour de la bobine. Une extrémité du fil de pêche est fixée à l'élastique de la pièce. Un poids est suspendu à l'autre extrémité.
Comme je l'ai constaté après un premier essai, la vibration du moteur se transmet très fortement au bois. Il en résulte un bruit de vibration très fort, ce que j'ai trouvé très gênant. J'ai donc essayé de minimiser les vibrations autant que possible. Les pilotes du moteur interpolent les différentes étapes. Ainsi, le moteur tourne plus doucement et vibre moins. J'ai optimisé cela dans un premier temps, mais les vibrations étaient toujours très fortes et gênantes. J'ai donc utilisé du caoutchouc mousse pour réduire la transmission des vibrations.
La bobine est reliée au moteur par un accouplement d'arbre. L'arbre est logé dans un roulement à billes. La bobine est reliée à l'arbre par des vis sans tête.


Espace mobile
L'idée initiale de créer un espace en tissu stretch a posé plusieurs problèmes. Une construction permettant d'entrer dans la pièce aurait été nécessaire : Par exemple, un câble qui soulèverait le tissu de manière à ce que l'on puisse entrer en dessous. En outre, le tissu devait être extrêmement léger, extrêmement extensible et ne devait pas se détendre. Seul un tissu spécial pour le théâtre possède cette propriété, mais il est extrêmement cher.
J'ai donc opté pour une autre solution : les parois latérales ne sont pas constituées d'un tissu continu, mais de cordes de laine disposées verticalement de manière serrée. Les cordes de laine sont nouées en haut et en bas à des élastiques de dix mètres de long chacun. Les élastiques sont reliés à la bobine du moteur par un fil de pêche. Un poids amène les élastiques à une tension de base. Lors d'un premier essai, l'élastique supérieur s'est mis à osciller très fortement, mais pas l'élastique inférieur, car il reposait sur le sol. J'ai alors construit un support pour l'élastique supérieur à l'aide de fils de pêche tendus.
Éclairage
La structure en bois et le plafond sont suspendus avec du molleton. La pièce n'est éclairée que par une lampe UV fixée au plafond au centre de la pièce. Le cordon de laine et l'élastique sont spécialement adaptés à la lumière UV, c'est pourquoi ils sont les seuls à être visibles.

Capteur de pouls : Angel Sensor M1
Comme il est relativement compliqué d'enfiler une ceinture pectorale et que je souhaite rendre l'installation aussi facilement accessible que possible, j'ai choisi un moniteur de fréquence cardiaque qui se porte au poignet. Il existe de nombreux capteurs de pouls qui s'adressent principalement aux sportives amateurs. Ils sont utilisés en combinaison avec un smartphone pour mesurer la fréquence cardiaque et ainsi déterminer la progression de l'entraînement. La plupart des capteurs utilisent un service Bluetooth standardisé. Celui-ci transmet à intervalles irréguliers le rythme cardiaque (BPM) à un récepteur (en général un smartphone).
Le fonctionnement de ces appareils n'est toutefois que partiellement adapté à mon projet. Heureusement, une campagne Kickstarter a été lancée en novembre 2015 pour un capteur de pouls à logiciel ouvert appelé Angel Sensor M1. L'Angels Sensor M1 est doté de deux LED qui s'allument sur ou aussi sous la peau. Les ondes lumineuses réfléchies sont mesurées par un capteur. La lumière est réfléchie différemment selon la quantité et la vitesse du sang qui circule sous les LED. Cela permet de calculer le rythme cardiaque. Mon espoir était de pouvoir évaluer les données des ondes lumineuses directement sur un ordinateur.
Comme la personne qui porte le pulsomètre bouge, ces données de mouvement devraient être prises en compte pour l'évaluation. Tout cela se passe directement sur le pulsomètre, mais l'algorithme n'est pas public et trop complexe pour mes connaissances en programmation pour que je puisse le concevoir moi-même. C'est pourquoi je ne peux recevoir que les BPM calculés par le pulsomètre. J'ai toutefois réussi à faire en sorte que ces valeurs soient envoyées aussi souvent que possible.

Logiciel / programmation
Un programme Node.js établit une connexion sérielle avec l'Arduino et une connexion Bluetooth avec le capteur de pouls.
Il n'existait pas de librairie Node.js pour le capteur Angel M1, j'ai donc écrit la mienne. Cette bibliothèque prend en compte presque tous les services et caractéristiques disponibles pour le M1. Parmi elles, la caractéristique de forme d'onde optique et la caractéristique de mesure de la fréquence cardiaque. Optical Waveform transmet les données brutes des ondes lumineuses, que je n'ai toutefois pas pu utiliser pour les raisons susmentionnées. Heart Rate Measurement transmet les battements par minute (BPM) la transmission a lieu lorsque les battements sont détectés de manière sûre. Comme les mouvements de la porteuse ne permettent pas de détecter chaque battement, le programme simule les battements non détectés.
Tous les coups sont transmis à l'Arduino par liaison série.
Le programme sur l'Arduino veille à ce que, à la réception d'un signal série, les pilotes des moteurs pas à pas soient commandés de telle sorte que les moteurs tournent d'environ 120 degrés en l'espace d'environ 200 millisecondes. Les quatre pilotes de moteurs pas à pas ont chacun trois signaux d'entrée. Un signal active ou désactive les moteurs. Un autre signal commande la direction du moteur. Le troisième signal donne l'ordre de faire un pas. Les pilotes de moteurs pas à pas sont réglés de telle sorte qu'un pas représente 1/16e de pas du moteur. Les moteurs ont 200 pas par tour.
J'ai fait des expériences pour voir à quelle vitesse et jusqu'où je pouvais faire tourner les moteurs. Si la vitesse de rotation est trop élevée, les moteurs ne bougent pas du tout. Si les moteurs tournent trop loin, la force de traction des câbles en caoutchouc devient trop élevée : les moteurs ne peuvent pas faire de pas, ils commencent à bégayer.
Le résultat des expériences : L'Arduino commande les pilotes du moteur avec un total de 1100 pas. Cela signifie que le moteur fait 68 pas ou tourne de 123 degrés. Un pas a lieu toutes les 100 microsecondes environ.
Après la rotation du moteur, les moteurs sont éteints jusqu'à ce que le prochain signal sériel arrive de l'ordinateur.
Si le destinataire appuie sur le bouton du pulsomètre, la connexion Bluetooth avec l'ordinateur est interrompue. Le programme Node.js n'envoie alors plus de signaux à l'Ardunio. La pièce s'arrête à nouveau.

Pour des raisons de lisibilité, nous avons renoncé à l'utilisation simultanée des formes linguistiques masculines et féminines. Toutes les désignations de personnes s'appliquent néanmoins à tous les sexes.
Licence
Tous les textes, graphiques et photos sont, sauf mention contraire, sous licence Creative Commons Attribution - Pas d'Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 International.
Remerciements
Ben, Benjamin, Charlotte, Chris, Christian, Damaris, Eva, Greta, Hanna, Prof. Dr. Ekbert Hering, Julius, Luca, Mama, Maria, Martin Schied, Nele, Papa, Phillip, Robert & Ursula Damm.
Références

La trahison des images (Ceci n'est pas une pipe), René Magritte, Belgique 1929. Los Angeles County Museum of Art

tele-present water, David Bowen
www.dwbowen.com/telepresentwater

Pulse Race, Times Up Linz, Robert Zauner (CC BY-NC)
flic.kr/p/67Cqcf

White Bouncy Castle, Julian Gabriel Richter
www.williamforsythe.de/installations.html?detail=1&uid=30
Déclaration sur l'honneur
Je déclare sur l'honneur que j'ai rédigé le présent travail de manière autonome.
Tübingen, le 13 mai 2016