Mensch und Raum sind gesetzerfüllt.
Wessen Gesetz soll gelten?
Bachelorarbeit
von Tobias Wolf
Bauhaus-Universität Weimar, 2016
Alles geht vom Ich aus.
Die Sinnesorgane des Menschen sammeln Informationen, diese werden interpretiert. Der Mensch erschafft sich ein Bild seiner Umwelt. Seine Umwelt ist sein Spiegel und somit auch ein Bild seiner selbst. Das ist das, was uns bleibt: ein Bild.
Sokrates
Unser Körper, wollen wir nicht sagen, der habe eine Seele?
Protarchos
Offenbar wollen wir das.
Sokrates
Woher aber, o lieber Protarchos, sollte er sie erhalten haben, wenn nicht auch des Ganzen Körper beseelt wäre, dasselbe habend wie er, und noch in jeder Hinsicht trefflicher?
Definition Mensch
Der Mensch ist vielfältig. Was es bedeutet Mensch zu sein, ist – zu unserem Glück – eine Frage, die niemals beantwortet werden kann. Das Notwendige für die vorliegende Arbeit besteht in der Betrachtung, was den Menschen ausmacht, was ihn einzigartig macht: seine Gedanken, seine Gefühle, die Psyche, der Geist, das Bewusstsein, die Seele. Darunter liegt das Organische, der Körper, der Leib, der Organismus. Diese Trennung funktioniert nur so lange, bis das Gehirn betrachtet wird.
Im Gehirn vermischt sich Körper und Geist, Leib und Seele.
Leib und Seele kann nicht getrennt werden. Jedoch bleibt der Ursprung, das Innerste des Menschen im Organischen.
Definition Raum
Der Raum kann physikalisch beschreiben werden: Dreidimensional: Breite, Tiefe, Höhe. Darin Materie und Felder. Durch die vierte, unabdingliche Dimension, die Zeit, wird der Raum zum Ort physikalischer Vorgänge. Die Wissenschaft sagt, Raum und Zeit seien relativ zueinander.
Der Kulturraum ist mindestens etymologisch mit dem physikalischen Raum verwandt, der hiermit auch seine Erwähnung gefunden hat und auch als Symbol, als Betrachtungsweise der Arbeit einbezogen werden soll.
Mensch und Raum sind gesetzerfüllt. Wessen Gesetz soll gelten?
Der Versuch Mensch und Raum zu verbinden
Der Raum wird erst durch die Erfahrung des Menschen als solcher wahrgenommen. Es gibt keine Hierarchie. Beide bedingen sich einander. Der Mensch kann nicht sein ohne Raum und der Raum ist nicht ohne Mensch.
Sie existieren immer nebeneinander und sind doch so unterschiedlich.
Der Mensch, der Lebendige, der Organische, der Sinnliche, der Beseelte, findet sich wieder im Raum, dem Unbelebten, dem Statischen, dem Physikalischen, dem Kubischen.
Diesen Dualismus von Mensch und Raum möchte ich in dieser Arbeit aufbrechen: Das Innerste des Menschen wird auf den Raum übertragen, der Raum wiederum wird vom Menschen wahrgenommen. Ein durch die Zeit getragener Kreislauf.
Doch so, wie sich der Durchschnitt zweier Linien, auf der einen Seite eines Puncts, nach dem Durchgang durch das Unendliche, plötzlich wieder auf der andern Seite einfindet, oder das Bild des Hohlspiegels, nachdem es sich in das Unendliche entfernt hat, plötzlich wieder dicht vor uns tritt: so findet sich auch, wenn die Erkenntniß gleichsam durch ein Unendliches gegangen ist, die Grazie wieder ein; so, daß sie, zu gleicher Zeit, in demjenigen menschlichen Körperbau am Reinsten erscheint, der entweder gar keins, oder ein unendliches Bewußtsein hat.
Unendliche Reflexion
Die Grazie ist nur in keinem oder im unendlichen Bewusstsein, sagt Kleist. Meine Bachelorarbeit ist der Versuch einer Annäherung an das unendliche Bewusstsein.
Täglich begegnen wir anderen Menschen die uns, durch ihr Gesagtes oder nur durch eine Geste, einen Blick, ein Spiegel sind. Das Selbst durchläuft das Gegenüber. Es wird von ihm gefiltert wahrgenommen und interpretiert. Dies drückt sich wiederum in Sprache oder Gestik aus. Der Spiegel in dem wir uns betrachten ist demnach durch die Interpretation getrübt.
In meiner Arbeit ist nur der Mensch und der Raum, sonst nichts. Der Raum dient als Spiegel des Menschen. Der Raum reflektiert des Menschens Innnerstes. Das ist das angestrebte Ideal.
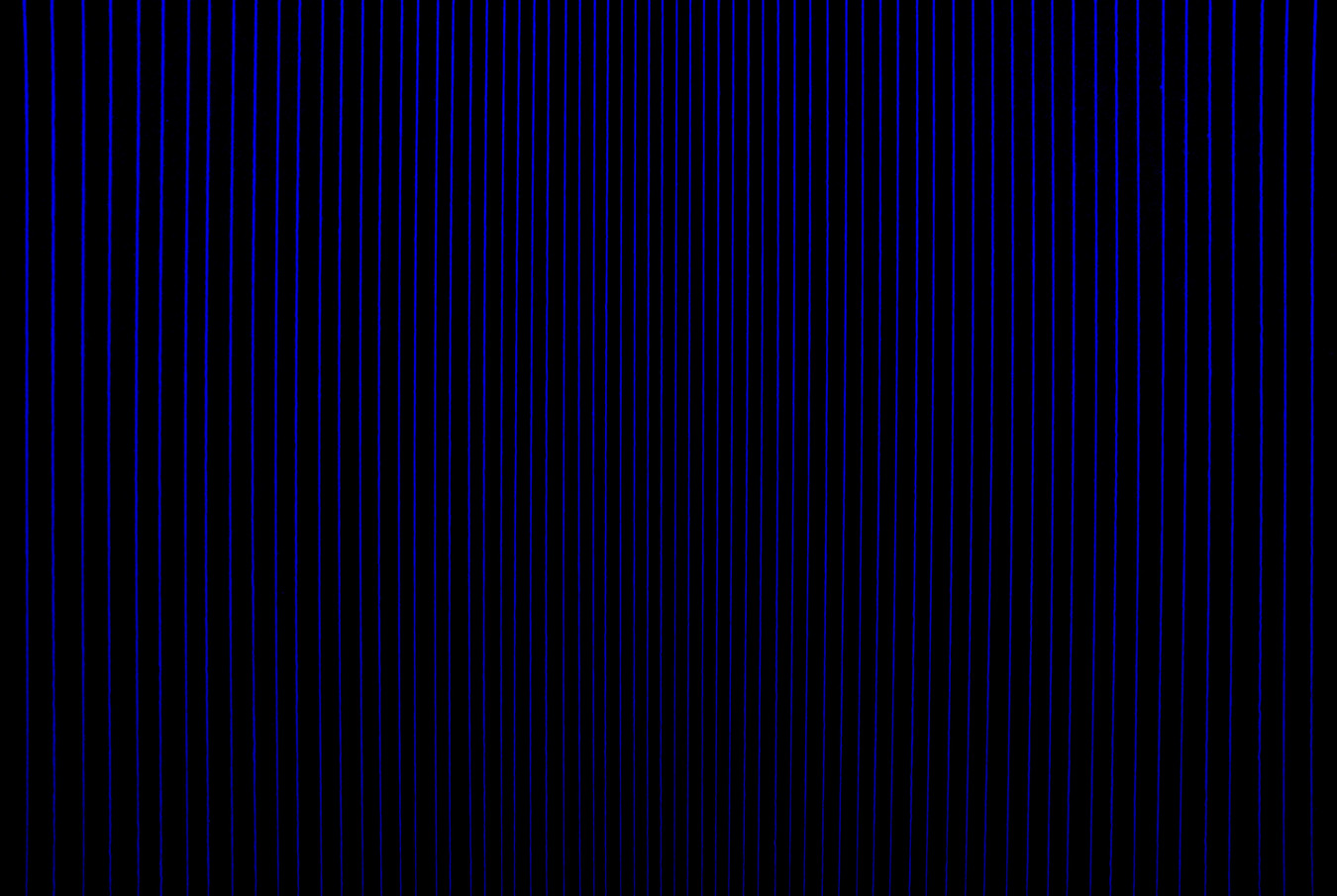
Der Raum soll soweit wie möglich ungestaltet sein. Das Schwarze ist Nichts, die Leere; das Weiße das Sein, der Raum. Die Begrenzung des Raums soll fühlbare Materie sein. Der Raum soll das Schlagen des Herzens 1:1 wiedergeben.

Raum-Installation
Der Raum ist kubisch und beweglich. Die obere und untere Raumkante ist durch weiße Gummibänder definiert, die Wände durch weiße Wollschnüre. Als Boden dient der vorhandene Boden des Ausstellungsraums. Die Decke bleibt offen, schwarz. Der Raum wird beleuchtet durch UV-Licht, das in der Mitte der Decke des Raums angebracht ist.
Der Herzschlag der Rezipientin wird durch einen Pulsmesser am Unterarm gemessen. Dieses Bild des Herzschlags wird an einen Arduino übertragen. Dieser steuert Motoren, die wiederum die Gummibänder synchron zum Herzschlag in Bewegung setzten. Der Raum simuliert das Herz der Rezipientin.
Die Rezipientin steht in einem Abbild ihres Herzens. Sie steht in ihrem Innersten.

Aufbau des Raums
Das kubische Gerüst ist aus Holz. Das Gerüst ist 4 × 4 × 3 Meter groß. Es ist mit Molton abgehangen und somit nicht sichtbar.
An jeder oberen Ecke ist ein Motor befestigt. An den Motoren sind über eine Spule jeweils zwei Angelschnüre befestigt.
Eine Angelschnur ist mit dem oberen Gummiseil verbunden. Die andere Angelschnur führt nach unten, wird durch eine Umlenkrolle umgelenkt und ist mit dem unteren Gummiseil verbunden. An den anderen Enden der Angelschnüre ist ein Gegengewicht befestigt. Dadurch haben die Gummiseile eine Grundspannung.
Zwischen den beiden Gummiseilen sind im Abstand von circa drei Zentimetern weiße Wollschnüre gespannt. Durch die Gummiseile und die Wollschnüre ergibt sich ein 3 × 3 × 3 Meter großer beweglicher Raum.
An einer Seite sind die Abstände der Wollschnüre größer. Dadurch wird der Ein-/Ausgang markiert.
An der Decke, in der Mitte des Raums befindet sich eine UV-Lampe. Die Decke ist mit Molton abgehangen. Durch das UV-Licht sind nur die Gummiseile und Wollschnüre sichtbar.
Ablauf
Die Rezipientin nimmt den Pulsmesser vom Podest und legt ihn an ihren Unterarm an.
Sie betritt den Raum.
Nach wenigen Sekunden hat der Pulsmesser den Puls/Herzschlag der Rezipientin erkannt. Der Raum nimmt den Herzschlag an.
Die Rezipientin kann sich beliebig im Raum bewegen.
Verlässt die Rezipientin den Raum, betätigt sie den Knopf des Pulsmessers oder nimmt sie ihn ab, stoppt die Bewegung des Raums.

Funktionsweise
Der Pulsmesser hat zwei LEDs, die auf die Haut der Trägerin leuchten. Die Reflexion des Lichts verändert sich abhängig vom durchfließendem Blut und wird von einem Sensor gemessen. Daraus lässt sich der Puls und von diesem wiederum der Herzschlag ableiten. Der Pulsmesser sendet via Bluetooth die Schläge pro Minute (beats per minute, BPM), sobald er diese ermitteln konnte. Anschließend sendet er jeden weiteren erkannten Pulsschlag – bewegt sich die Trägerin des Pulsmessers stark, kann der Pulsschlag weniger gut ermittelt werden.
Die BPM werden von einem Computer empfangen. Da davon ausgegangen werden kann, dass die Trägerin sich bewegen wird und dadurch nicht jeder Pulsschlag ermittelt und somit auch nicht gesendet werden kann, werden die BPM durch einen einfachen Algorithmus simuliert.
Bei jedem Pulsschlag (ungeachtet dessen ob direkt vom Sensor oder simuliert) wird vom Computer ein Signal an den Arduino übertragen. Mit jedem Signal sendet der Arduino wiederum innerhalb von 200 Millisekunden 1400 Schritt-Signale an vier Schrittmotortreiber.
Diese wiederum interpolieren die Schritt-Signale, steuern den Strom und sorgen dafür, dass sich die vier Motoren innerhalb der 200 Millisekunden um circa 130 Grad drehen. Dabei sind die Motoren deutlich zu hören. Anschließend sorgt der Arduino dafür, dass keine Spannung mehr auf den Motoren liegt. Durch die mechanische Spannung der Gummiseile drehen sich die Motoren wiederum um circa 130 Grad in die entgegengesetzte Richtung.
Dieser Ablauf wiederholt sich bis die Rezipientin den Raum verlässt, den Pulsmesser abnimmt oder den Knopf des Pulsmesser betätigt.

Betrachtung von Raum, Rezipientin & Technik
Der Raum, die Rezipientin und die Technik. Im Folgenden möchte ich diese drei Elemente/Medien meiner Arbeit betrachten.
Der Raum
Der Raum soll ein Symbol für alles sein. Ein Raum, der unsere Welt in der wir leben, symbolisiert. Die meisten Menschen leben in Städten. Diese sind geprägt durch ihre Architektur. Und, auch wenn die meisten zeitgenössischen Architekten und die Gründerzeit dagegen ankämpfen, bleiben die meisten Gebäude, Straßen, Bushaltestellen und Bordsteinkanten kubisch.
Wenn sich die Menschen nicht in Städten bewegen, bewegen sie sich in digitalen Räumen (Facebook, Snapchat u.ä.). Ein Kulturraum, dessen Grundlage ebenfalls auf mathematischen Grundsteinen gebaut ist. Die digitalen Plattformen, über die wir kommunizieren, basieren auf logischen Operatoren.
Darüber hinaus sehnen sich die Menschen, wie aktuell ganz gut an der politischen Stimmung erkannbar ist, nach Klarheit, nach einfachen Formen und Wahrheiten. (Daesch, Erdogan, AFD, Trump)
Und deshalb habe ich einen Würfel als Raumform gewählt. Kubisch, mathematisch und einfach. Die vertikalen Wollschnüre können an Gitterstäbe erinnern. Sie sind jedoch so eng zueinander angeordnet, dass sie auch als Fläche wahrgenommen werden können. Außerdem sind die scheinbaren Gitterstäbe weich und flexibel.
Mit dem ersten Herzschlag verliert der Raum all seine Eigenschaften. Durch das schnelle spannen und entspannen der Gummiseile schwingen die Wollschnüre hin und her.
Der Raum wird lebendig.
Der Herzschlag der Rezipientin ist ihr Antrieb.
Der Raum verliert seine ursprünglichen Eigenschaften und nimmt die organischen Eigenschaften eines Lebewesens an, die Eigenschaften der Rezipientin.
Verlässt die Rezipientin den Raum, schwingen die Wollschnüre noch kurz nach, kehren aber schnell wieder in ihre ursprüngliche, geordnete Form zurück. Der Raum bleibt nur so lange lebendig, solange der Mensch in ihm ist.
Die Rezipientin
Nachdem die Rezipientin den Raum betritt, findet sie sich wieder in eben dieser kubischen, mathematischen, einfachen Welt. Die Dunkelheit und die eng aneinander angeordneten, vertikalen Wollschnüre wirken surreal, unwirklich; ganz anders als die bekannte Welt. Doch der Ausbruch aus dieser Welt wäre möglich. Die Wollschnüre wären theoretisch durchbrechbar.
Sobald man beginnt sich damit auseinanderzusetzen, beginnt der Raum sich zu bewegen. Durch das Schwingen der Wollschnüre verliert der Raum seine bisherige Form und somit auch seine ursprüngliche Bedeutung.
Die Rezipientin sieht auf das Bild ihres Herzschlags. Dieses Bild wird gezeichnet auf der kubischen, mathematischen, einfachen Form des ursprünglichen Raums.
Dadurch, dass die Rezipientin auf das Bild ihres Herzens schaut, schaut sie in ihr Innerstes, sie schaut in sich selbst. Introspektion.
Die Technik
Zwischen Rezipientin und Raum steht die Technik. Der Herzschlag wird vom Pulssensor interpretiert und über Funkwellen, Computer, elektronische Bauteile und die Motoren an den Raum übertragen. Das hat zur Folge, dass das daraus entstehende Produkt eben nicht das Abbild des Herzschlags ist, sondern das, was durch das Durchlaufen der Technik von ihm übrig geblieben ist. Es ist uns also unmöglich unser Selbst in dem Raum wiederzufinden. Die technologische Welt hilft uns eben nicht, uns selbst zu erkennen.
Das was wir erkennen können ist zwangsweise geprägt, zum Einen durch die verwendete Technik und zum Anderen durch deren Ausgestaltung. Darüber hinaus ist auch die Wahrnehmung des Schlagens des Herzens geprägt: durch die Sinnesorgane. Der Mensch nimmt nur das wahr, was er wahrnehmen kann und nicht das, was möglicherweise ist.
Die etwaige Vorstellung, die Rezipientin könnte sich durch diese Installation selbst erkennen, sollte somit gebrochen sein. Dennoch.
Was die Technik kann, ist uns einen neuen, anderen Blick aufzuzeigen. Und so verhält es sich mit allem. Nichts kann uns ein perfekter Spiegel sein. Das Bild, das wir von uns selbst wahrnehmen ist immer unvollständig und verzerrt. Doch vielleicht ist es ja die Summe aller Teile, die uns selbst erkennen lässt.
Die Entfremdung des eigenen Körpers durch das Digitale
Immer mehr definiert sich der Mensch durch Likes, Emoticons und GIFs. Was von seinem Körper übrig bleibt, ist ein zweidimensionales Abbild, geformt vom Kamerachip des Smartphones und eingerahmt im us-amerikanischen Kapitalismus.
Manche Menschen versuchen mit Hilfe von Fitnesstracker durch scheinbare Selbstbeobachtung ihre Gesundheit zu optimieren. Ein Unternehmen, dessen innerstes Interesse es ist, Geld zu verdienen, hat einen Algorithmus programmiert, der uns sagt, ob wir schneller oder langsamer joggen sollen.
Der eigene Körper ist in dieser digitalen Welt nicht mehr von Bedeutung. Je mehr wir unser Leben in die digitale Welt verlagern, wird diese Welt ein immer größerer, wichtigerer Spiegel des Menschen. Dieser Spiegel ist gebaut aus dem vom Menschen Geschriebenem, Fotografiertem und Gefilmtem. Doch das ist doch nur ein kleiner Teil von uns.
Im Gegensatz zum Menschen haben Algorithmen keine Ahnung, wie es ist Mensch zu sein. Dennoch nehmen sie auf uns Einfluss, indem sie uns vorschlagen was wir kaufen, welche Freunde wir zu unseren „guten Freunden“ hinzufügen und welche Partei wir liken sollen. Bald werden Algorithmen, gespeist von den menschlichen Ausdünstungen Menschlichkeit simulieren. Allerdings ohne Körper. Dabei ist doch Leib und Seele unzertrennbar.

Mensch & Raum und
tele-present water
David Bowen – 2011
Die kinetische Installation zeigt die Bewegungen des Wassers. Die Daten der Wasserbewegung stammen von einer Boje im Pazifischen Ozean.
David Bowen macht durch die Veränderung des Raums Dinge sichtbar, die sonst verborgen blieben. Die Eigenschaften des Subjekts werden interpretiert und über die Technik in eine neue Form gebracht. Dabei versteckt er die Technik nicht. Die Technik ist aktiver Teil des Objekts. Die Daten des Wassers werden leider nicht in Echtzeit übertragen. Die Echtzeit würde das Erlebnis der Betrachtung des Kunstwerks intensivieren.
Es wird klar, dass man die Natur nicht kopieren oder 1:1 darstellen kann. Es kann immer nur ein, durch die Technik vorgegebenes, Bild erstellt werden. Dabei ist es egal ob die Technologie ein Pinsel, Computer oder künstliches neuronales Netz ist.

Mensch & Raum und
Body SPIN: Pulse Race
Time’s Up – 2003
Body SPIN ist eine im Durchmesser drei Meter große, begehbare Kugel. Abhängig von den Bewegungen der Rezipientin werden computergenerierte Bilder in die Kugel projiziert. Mehrere Programme können abgespielt werden. Beim Programm Pulse Race trägt die Rezipientin zusätzlich ein Pulsmesser. Bei Pulse Race muss die Rezipientin bis zum Ziel laufen. Das Ziel entfernt sich jedoch mit jedem Pulsschlag.
Die Rezipientin kämpft mit ihrem Äußeren (Laufen) gegen ihr Inneres (Herzschlag). Es wird deutlich, dass das Innen und Außen sich gegenseitig bedingen. Eine Dualität. Man kämpft mit seinem Körper gegen seinen Körper. Die Wahrnehmung wird hauptsächlich durch das Optische gesteuert. Das Ziel ist ein Simuliertes.
Bei dieser Arbeit werden die neusten technologischen Errungschaften in einer Leistungsshow vorgeführt. Technologisch war dies zu dieser Zeit sicherlich beeindruckt. Doch diese Arbeit geht von der Technik aus und nicht vom Menschen. Die technischen Geräte, die die Rezipientin mit sich tragen muss und die technischen Projektionen überwiegen das Menschliche.

Mensch & Raum und
White Bouncy Castle
William Forsythe, Dana Caspersen and Joel Ryan – 1997
White Bouncy Castle ist eine 30 Meter lange und 11 Meter hohe Hüpfburg in Form eines Schlosses.
William Forsythe und Dana Caspersen lassen in ihrer Arbeit nicht nur die Tänzerinnen verschwinden, sondern deformieren gleichzeitig auch den Tanzboden. Die Besucherinnen werden selbst zu Tänzerinnen, gesteuert durch die unkontrollierbaren Eigenheiten des Bodens. Auch der wackelige Boden bildet einen starken Kontrast zum klassischen Tanzboden, der doch dazu dient, der Tänzerin halt zu bieten und ihr präzise Bewegungen ermöglichen soll. Das Schöne einer Hüpfburg ist, dass sie dem Menschen die Möglichkeit gibt, die Schwerkraft für kurze Momente zu überwinden. In der Luft ist der Mensch nicht zu Hause, woraus sich ein Kontrollverlust ergibt, der wiederum in absurden sozialen Situationen münden kann.
Die Verformungen des Bodens / des Raums sind zufällig und doch haben sie ihren Ursprung in den Bewegungen der Besucherinnen. Somit ist der Raum auch ein Spiegel der Lebendigkeit der Besucherinnen. Im Gegensatz zu meiner Arbeit wird hier jedoch der Ausdruck mehrerer Menschen wieder gespielt und nicht das Organische eines Einzelnen.

Dokumentation
Ich blieb an Oskar Schlemmers Zitat »Mensch und Raum sind gesetzerfüllt. Wessen Gesetz soll gelten?« hängen. Ich fragte mich, wie man dieses Problem heute angehen würde. Wie könnte ich diesen Dualismus brechen? Da eben alles vom Menschen ausgeht, wollte ich einen Raum schaffen, der die Gesetze des Menschen annimmt.
Im ersten Moment vermutete ich das menschlichste des Menschen im Gehirn. Man kann die Gehirnströme mit Hilfe der Elektroenzephalografie (EEG) messen. Dafür gibt es halbwegs erschwingliche Prosumer-Produkte, jedoch wären damit einige Einschränkungen verbunden gewesen. Das, mit dem EEG verbundene, Computerprogramm benötigt ein Traingsprogramm bis es wagt Aussagen über den emotionalen Zustand des Benutzers zu treffen. Die Aussagen solcher EEGs sind äußerst wage und mehr Schein als Sein. Zudem lassen sich zwar für die Aussage, das menschlichste des Menschen sei im Gehirn zu finden, durchaus Argumente dafür finden, absolut ist dies jedoch keineswegs.
So entschied ich mich für das Herz, das womöglich durch seine Symbolik noch mehr für die Emotionalität des Menschen steht, als wage Gehirnströme. Letztendlich ist der Herzschlag auch leichter und eindeutiger zu messen.
Sicherlich geprägt durch die typischen Architekturbilder des Bauhaus, erschien mir der weiße, kubische Raum als der räumlichste Raum.

Der Raum ist für den Menschen immer eine Einschränkung. Die Anziehungskraft, als Teil des Raums, hindert den Menschen unendlich in die Höhe zu springen. Architektur versperrt uns Blicke und Wege. Deshalb war eine Überlegung, den Raum / die Architektur unmittelbar an den Willen des Menschen anzupassen. Bewegt der Mensch sich schnell, so schlägt das Herz schneller und er benötigt möglicherweise mehr Platz. Der Raum könnte sich vergrößern.
Eine erste Überlegung bestand darin, den Raum komplett aus Holz zu bauen. Eine Maschinerie unter dem Raumboden könnte den Raum vergrößeren und verkleinern. Doch eine solche Konstruktion wäre extrem komplex und aufwendig geworden. Deshalb wurde schnell klar, dass eine solche Realisierung völlig utopisch ist.

Raummodell 1
Flexibler Stoff könnte ebenso einen Raum bilden. Motoren an den Ecken könnten den Raum vergrößern und verkleinern. Zu dieser Überlegung entstand in wenigen Stunden das erste Modell aus Draht und Strumpfhose.
An diesem Modell zeigt sich, dass der Stoff sich in der Mitte wölbt. Der Raum verliert also seine kubische Form.

Raummodell 2
Modellholz, Stretchstoff, acht Trinkhalme, Angelschnur; Arduino Uno, Schrittmotor (Sparkfun Electornics [ROB-10846]), Schrittmotortreiber (SilentStepStick), Computer, Brustgurt-Pulsmesser (ICubeX BioVolt Sensor) verbunden mit einem Arduino Yún, Akku für Arduino Yún.
Die Daten des Pulsmessers werden mit Hilfe des Arduino Yún per Wlan an einen Computer gesendet. Dieser wiederum gibt Daten an den Arduino Uno weiter, der den Schrittmotortreiber ansteuert.
Hier wurde deutlich, dass in sehr kurzer Zeit sehr viel Kraft von Nöten ist. Der Schrittmotor konnte den Stoff nur wenige Zentimeter dehnen. Außerdem war ersichtlich, dass der Stoff selbst nachschwingt. Das Anlegen des Pulsmesser ist sehr umständlich. Die Kontakte des Pulsmesser müssen mit einem Gel befeuchtet werden. Eine Tasche mit Arduno Yún und einem Akku muss um die Schulter getragen werden. Der Vorteil eines Brustgurts ist jedoch, dass er den Herzschlag genauer messen kann.
Das Raummodell 2 wurde während der summaery 2015 ausgestellt.
Es war möglich, seinen Herzschlag in dem Raummodell zu erkennen. Allerdings konnte man das Modell eben nur von außen betrachten. Man war nicht Teil des Raums. Die logische Konsequenz daraus ist einen Raum zu bauen, den man auch begehen kann. Das Modell hat gezeigt, dass alles Technische möglich ist.

Bau des Raums: Holzgerüst
Mir war klar, dass ich noch viel experimentieren werden müsste. Deshalb erklärte ich von vornherein meinen Arbeitsraum auch als späteren Ausstellungsraum. Mein Arbeitsraum ist 420 × 480 × 300 cm groß. Dementsprechend plante ich für diese Größe mit Hilfe von Skizzen, einem Blender-Modell und nach Beratung von Tischlergeselle Benjamin die Installation.
Material
Vertikale Stützen, Holz (Fichte): 280 × 10 × 10 cm (4 Stück)
Horizontale Balken & Streben, Holz (Fichte): 400 × 6 × 10 cm (6 Stück)
Dreieckige Platten, Schichtplatte (Fichte): 60 × 60 cm (2 Stück)
Winkel 70 × 70 × 55 × 2,2 mm (12 Stück)
Schrauben (100 Stück)

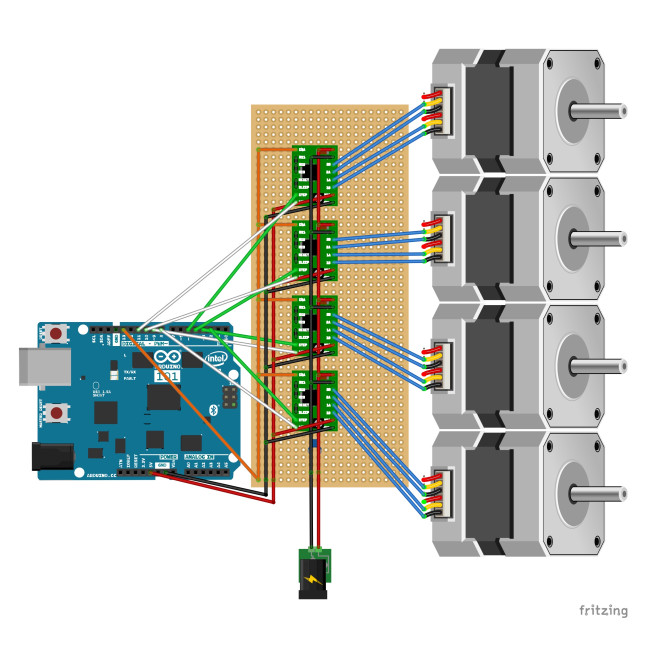
Motorsteuerung
Material
4 Schrittmotoren: Pololu Stepper Motor: Unipolar/Bipolar, 200 Steps/Rev, 57 × 76 mm, 4.5 V, 2 A/Phase
4 Schrittmotortreiber: Pololu A4988 Stepper Motor Driver, Black Edition
Kondensator: 63 V / 1000 µF
Stromquelle 24 Volt / 10 Ampere
Arduino 101
Gehäuselüfter mit vorgeschaltetem Spannungswandler
Leiterplatte, Lötzinn & Jumper-Kabel
Da ich wusste, dass sehr starke Kräfte vonnöten sein werden um den Raum zu bewegen, entschied ich mich für Schrittmotoren mit einem Haltedrehmoment von 14 kg/cm. Diese Motoren benötigen entsprechend viel Strom (2 A/Phase). Deshalb wählte ich Schrittmotortreiber die diese Stromstärke, mit entsprechender Kühlung aushalten. Zur Kühlung verwende ich kleine Kühlkörper, die auf den Motortreibern sitzen und zusätzlich einen Gehäuselüfter, der die Motortreiber mit kalter Luft versorgt. Um die Motortreiber anzusteuern wählte ich den Arduino 101. Dieser hat im Vergleich zum Arduino Uno eine höhere Taktrate. Dadurch können an die Motortreiber mehr Signalen pro Zeiteinheit gesendet werden. Die Spannungsquelle liefert 10 Ampere, gerade genug um die vier Motoren mit jeweils 2 Ampere zu versorgen. 24 Volt sorgen dafür, dass die Treiber schnell getaktet sind und dadurch die Motoren möglichst ruhig laufen.

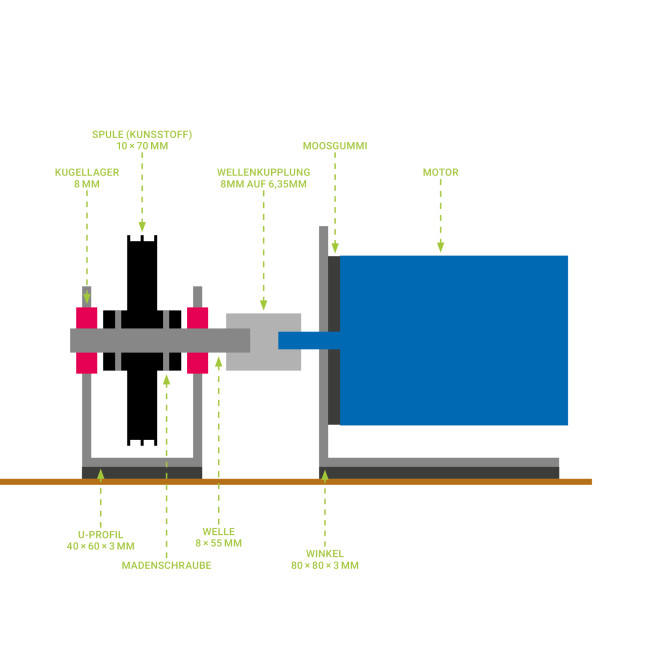
Motoraufhänung
An jedem oberen Ecke des Raums wird ein Motor mit einer Spule befestigt. Um die Spule wird mehrmals eine Angelschnur gewickelt. Das eine Ende der Angelschnur ist am Gummiband des Raums befestigt. Am anderen Ende hängt ein Gewicht.
Wie ich nach einem ersten Versuch feststellte, überträgt sich die Vibration des Motors sehr stark auf das Holz. Daraus resultiert ein sehr lautes Vibrationsgeräusch, was ich als sehr störend empfunden habe. Deshalb versuchte ich die Vibrationen so gut es geht zu minimieren. Die Motortreiber interpolieren die einzelnen Schritte. Dadurch läuft der Motor ruhiger, vibriert weniger. Dies habe ich im ersten Schritt optimiert, doch die Vibrationen waren immer noch sehr stark und störend. Deshalb habe ich Moosgummi benutzt, um die Übertragung der Vibrationen zu verringern.
Die Spule ist über eine Wellenkupplung mit dem Motor verbunden. Die Welle ist in einem Kugellager gelagert. Die Spule ist mit Madenschrauben mit der Welle verbunden.


Beweglicher Raum
Die ursprüngliche Idee, den Raum aus Stretchstoff zu gestalten, brachte verschiedene Probleme mit sich. Eine Konstruktion, die den Eintritt in den Raum ermöglicht, wäre nötig gewesen: Beispielsweise ein Seilzug, der den Stoff anhebt, so dass man darunter eintreten könnte. Außerdem müsste der Stoff extrem leicht, extrem dehnbar sein und dürfte nicht ausleiern. Diese Eigenschaft hat nur spezieller Theaterstoff, der allerdings extrem teuer ist.
Deshalb entschied ich mich für eine andere Lösung: Die Seitenwände bestehen nicht aus einem durchgehenden Stoff, sondern aus vertikal eng angeordneten Wollschnüren. Die Wollschnüre sind oben und unten an jeweils zehn Meter lange Gummibänder geknotet. Die Gummibänder sind mit einer Angelschnur mit der Spule des Motors verbunden. Ein Gewicht bringt die Gummibänder auf eine Grundspannung. In einem ersten Versuch begann das obere Gummiband sehr stark zu schwingen, das untere nicht, da es auf dem Boden auflag. Daraufhin konstruierte ich aus gespannten Angelschnüren eine Auflage für das obere Gummiband.
Beleuchtung
Die Holzkonstruktion und die Decke ist mit Molton abgehangen. Der Raum ist nur durch eine UV-Lampe, die an der Decke in der Mitte des Raums angebracht ist beleuchtet. Die Wollschnur und das Gummiband sind speziell für UV-Licht geeignet, deshalb sind nur sie sichtbar.

Pulssensor: Angel Sensor M1
Da ein Brustgurt relativ aufwändig anzuziehen ist und ich die Installation so einfach wie möglich zugänglich machen möchte, wählte ich einen Pulsmesser, der am Handgelenk getragen wird. Es gibt zahlreiche Pulssensoren, die sich hauptsächlich an Hobbysportlerinnen richten. Diese werden in Verbindung mit einem Smartphone zum Messen der Herzfrequenz und dadurch zum Ermitteln des Trainingsfortschritts verendet. Die meisten der Sensoren verwenden einen standardisierten Bluetooth-Service. Dieser übermittelt in unregelmäßigen Abständen den Pulsschlag (BPM) an einen Empfänger (in der Regel ein Smartphone).
Diese Geräte sind allerdings in ihrer Funktionsweise für mein Vorhaben nur bedingt geeignet. Glücklicherweise wurde im November 2015 eine Kickstarter-Kampagne für einen Open-Software-Pulssensor namens Angel Sensor M1 gestartet. Der Angels Sensor M1 hat zwei LEDs, die auf bzw. auch unter die Haut leuchten. Die reflektierten Lichtwellen werden von einem Sensor gemessen. Je nachdem wieviel und wie schnell Blut unter den LEDs fließt, wird das Licht unterschiedlich reflektiert. Daraus wird der Pulsschlag errechnet. Meine Hoffnung war, die Daten der Lichtwellen direkt auf einem Computer auswerten zu können.
Da die Trägerin des Pulsmessers sich bewegt, müssten diese Bewegunsdaten zur Auswertung mit einbezogen werden. Das passiert auch alles direkt auf dem Pulsmesser, der Algorithmus dafür ist jedoch nicht öffentlich und für meine Programmierkentnisse zu komplex um ihn selbst zu entwerfen. Deshalb kann ich auch nur die von dem Pulsmesser errechneten BPM empfangen. Jedoch konnte ich erreichen, dass diese Werte so häufig wie möglich gesendet werden.

Software / Programmierung
Ein Node.js-Programm stellt eine serielle Verbindung mit dem Arduino und eine Bluetooth-Verbindung mit dem Pulssensor her.
Es gab keine Node.js-Library für den Angel Sensor M1, weshalb ich eine eigene schrieb. Diese Library berücksichtigt fast alle für den M1 verfügbaren Services und Characteristics. Darunter Optical Waveform Characteristic und Heart Rate Measurement Characteristic. Optical Waveform überträgt die rohen Lichtwellen-Daten, die ich jedoch aus oben genannten Gründen nicht verwenden konnte. Heart Rate Measurement überträgt die Schläge pro Minute (BPM) die Übertragung findet dann statt, wenn die Schläge sicher erkannt werden. Da durch die Bewegung der Trägerin nicht jeder Schlag erkannt wird, werden die nicht erkannten Schläge durch das Programm simuliert.
Alle Schläge werden per serieller Verbindung an den Arduino übertragen.
Das Programm auf dem Arduino sorgt dafür, dass bei Empfang eines Serial-Signals die Schrittmotortreiber so angesteuert werden, dass die Motoren sich innerhalb von circa 200 Millisekunden um circa 120 Grad drehen. Die vier Schrittmotortreiber haben jeweils drei Eingangssignale. Ein Signal schaltet die Motoren an bzw. aus. Ein weiteres Signal steuert die Richtung des Motors. Das dritte Signal gibt den Befehl für einen Schritt. Die Schrittmotortreiber sind so eingestellt, dass ein Schritt 1/16 Schritt des Motors bedeutet. Die Motoren haben 200 Schritt pro Umdrehung.
Ich experimentierte, wie schnell und wie weit ich die Motoren drehen kann. Ist die Drehgeschwindigkeit zu hoch, bewegen sich die Motoren gar nicht. Drehen sich die Motoren zu weit, wird die Zugkraft der Gummiseile zu hoch: Die Motoren können Schritte nicht machen, sie beginnen zu stottern.
Das Ergebnis der Experimente: Der Arduino steuert die Motortreiber mit insgesamt 1100 Schritten an. Das bedeutet, der Motor macht 68 Schritt bzw. dreht sich um 123 Grad. Ein Schritt erfolgt circa alle 100 Mikrosekunden.
Nach der Drehung des Motors werden die Motoren ausgeschaltet, bis das nächste serielle Signal vom Computer kommt.
Drückt die Rezipientin den Knopf auf dem Pulsmesser, wird dadurch die Bluetoothverbindung zum Computer unterbrochen. Das Node.js-Programm sendet dann auch keine weiteren Singnale an den Ardunio. Der Raum kommt wieder zum Stillstand.

Aus Gründen der besseren Lesbarkeit wurde auf die gleichzeitige Verwendung männlicher und weiblicher Sprachformen verzichtet. Sämtliche Personenbezeichnungen gelten gleichwohl für alle Geschlechter.
Lizenz
Alle Texte, Grafiken und Fotos sind, sofern nicht anders gekennzeichnet, lizenziert unter einer Creative Commons Namensnennung – Nicht-kommerziell – Weitergabe unter gleichen Bedingungen 4.0 International Lizenz.
Dankesagung
Ben, Benjamin, Charlotte, Chris, Christian, Damaris, Eva, Greta, Hanna, Prof. Dr. Dr. Ekbert Hering, Julius, Luca, Mama, Maria, Martin Schied, Nele, Papa, Phillip, Robert & Ursula Damm.
Quellenangaben

La trahison des images (Ceci n’est pas une pipe), René Magritte, Belgien 1929. Los Angeles County Museum of Art

tele-present water, David Bowen
www.dwbowen.com/telepresentwater

Pulse Race, Times Up Linz, Robert Zauner (CC BY-NC)
flic.kr/p/67Cqcf

White Bouncy Castle, Julian Gabriel Richter
www.williamforsythe.de/installations.html?detail=1&uid=30
Ehrenwörtliche Erklärung
Ich erkläre hiermit ehrenwörtlich, dass ich die vorliegende Arbeit selbständig angefertigt habe.
Tübingen, 13. Mai 2016